


















Description
![]()
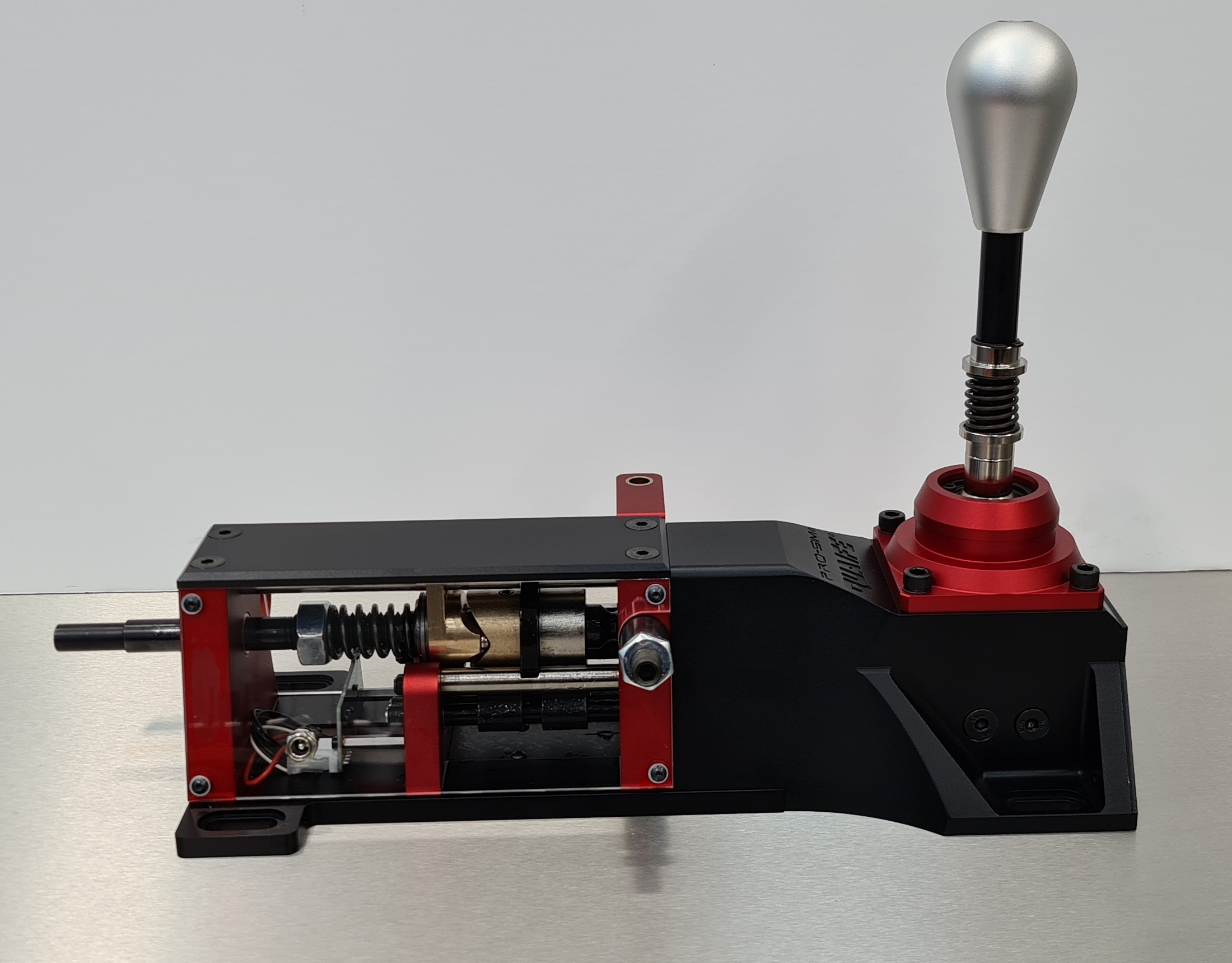
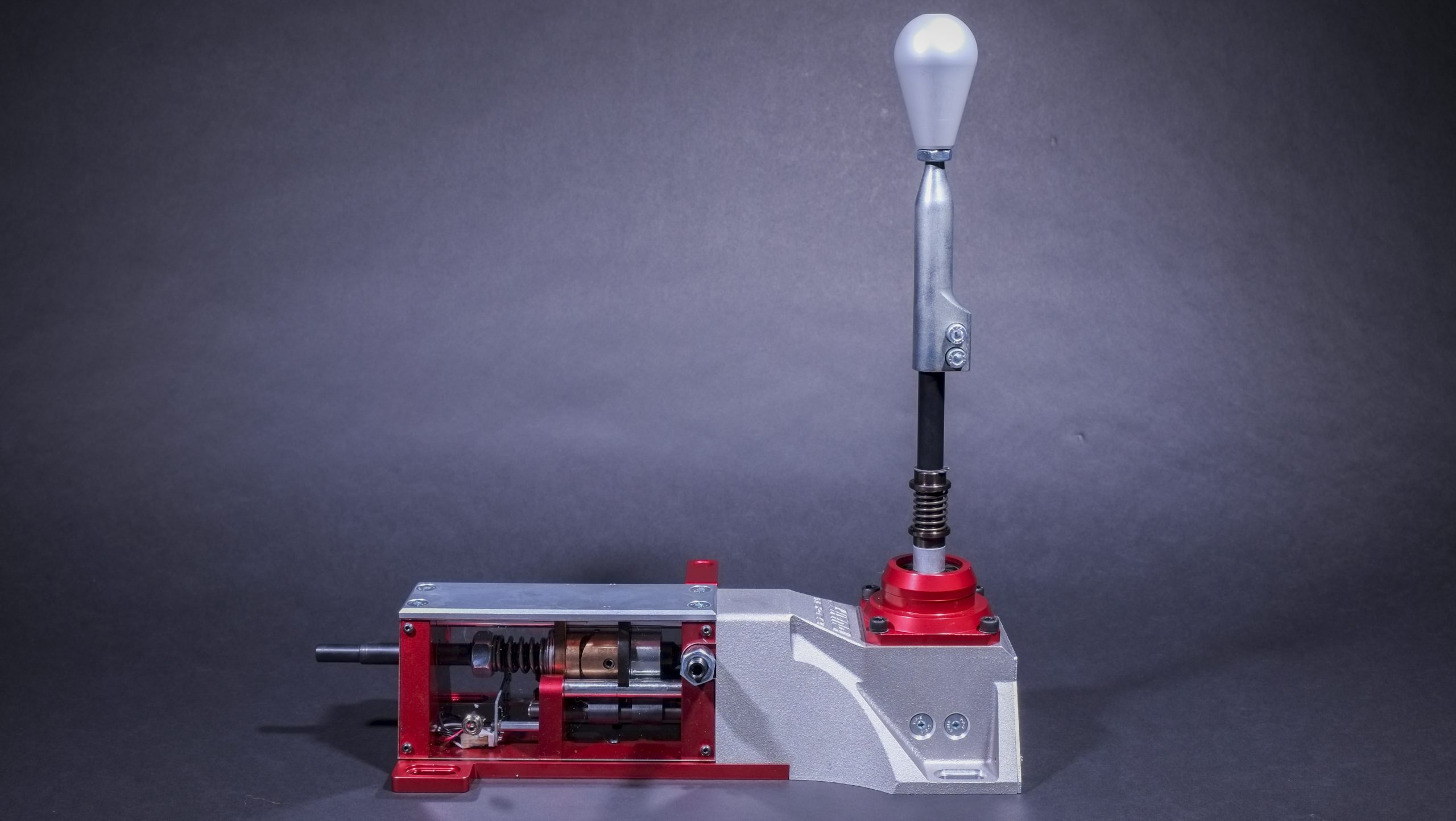
The feeling is exactly the same as the real car and when you change gear and you can also see the selector rods engaging behind the Perspex cover exactly like your real gearbox would. The design and concept is taken directly from a production Quaife H pattern gearbox. On our shifter the feeling comes from the selector rods and the centralization device used on most gearboxes rather than relying on a gate plate at the top which is what all other shifters on the market currently do.
The shifter itself is fully adjustable with the force of both centering and going through the gate easily adjustable by the user. The pivot point of the gear lever is also adjustable meaning without changing the length of the lever you can adjust the through between gears. The shifter has a short gear lever as standard which is something similar to one found on a Caterham and by the use of our shaft extension you have an additional 150mm possible in height and this is adjustable by 70mm to any height required.
The shifter will have a USB B socket on the back to be connected directly to the PC as a stand-alone device, we will supply the shifter with a high quality 2m USB A to B cable.
Material:
One big differentiator of our gear shifters to the current market is the material. In a market where plastic products have dominated, people often think ‘metal’ is considered the hardest or toughest material that could be used. For us just any old metal is not enough. We use the highest quality steel 835M19 often found in aerospace applications and go one step further to apply heat treatment to case harden the material. Once the material has been hardened only the most specialised carbide/diamond tools can be used to perforate it. We do this for ultimate durability on all the critical components, creating a shifter designed to last a lifetime.
The proof can be seen in the longevity of our products with the first being produced in 2017 and not having a single breakage to date, even with several 1000 made in total and counting.
Motion Ratio adjustment of gear lever:
If you adjust the motion ratio following our video guide here https://youtu.be/XOOHsE3gGgI
All shifters leave our factory with the bearing in the upper position which gives the shortest travel on the lever. With the bearing in the lower position the same length lever will travel further. The photo below shows the difference you can expect it to make, this photo is without the shaft extension and shows 6th gear engaged.

See a reviews of our shifter below:
Hydraulic shift lock mechanism explained (Optional Extra can be retro fitted)
The main problem with all shifters on the market at the moment is that you cannot simulate missed gears nor have any interaction with the software. For this to be accurate it also needs to simulate the different type of gearboxes for dog engagement and also synchromesh:

Synchromesh:
A synchromesh gearbox is what you would commonly find in your road car. This type of gear is engaged using cones to match the speed of the gears and then held in place with multiple ‘teeth’. With this type of gearbox there is virtually no play when in gear but there is a lot of surface area with load on holding the gear in place. Because of the load on the teeth and the fact there is not much space the gear needs to be doing almost exactly the same speeds to be able to engage and this is what the cones do but they cannot overcome the engine brake without doing damage to the gearbox and so the clutch is needed for all changes.
Dog engagement:
A dog engagement box is what you will commonly find in race cars and on most sequential gearboxes. This type of gear usually has 3 to 6 ‘dogs’ on each gear and there is a lot of free space for them to engage this means there is normally quite a lot of play when in gear and why you often see race cars juddering forward and backwards when going down the pitlane. When you are driving fast this is not an issue as you are pushing on one side of the dog for acceleration or braking rather than hovering in the middle, this is also why they are not suitable for daily use on the road.
When shifting gears because of the space between the gears normally there can be up to a 900rpm difference in gear speeds and the gear will still go in, because of this you do not need the clutch. To make a gear change you need to reduce the load on the dogs so that it can released, this is normally done by just lifting the throttle on the up change. To change down a gear there is already a reduction in load that is sufficient you just need to blip the throttle so that you do not lock the rear wheels or cause unnecessary wear on the gearbox.
How this translates to our solution
With our solution we are able to replicate both types of shifting accurately; more importantly for dog engagement you are able to pull the lever very hard when accelerating and you will not be able to change gears but as soon as you lift it will go in. This was very important for us to achieve because is most race situations a gear change in a sequential box would happen by preloading the lever first and it was the number 1 priority this was achievable. Gear changes are done this way to reduce the shift time as you only need to lift until you feel it go in and quite often gear changes will be made with 30% throttle still applied so there is no loss in engine torque.
For the synchromesh option you will not be able to shift gears unless the clutch is pushed, you will however be able to preload the lever prior to pushing the clutch the same as the dog engagement box.
Why we use Quaife
![]()
RT Quaife Engineering Ltd uses motorsport-inspired design and precision engineering capabilities to deliver a large range of high performance drivetrain products destined for vehicle manufacturers, motorsport competitors and the retail aftermarket.
Quaife was founded in 1965. Headquartered near Sevenoaks in the South East of England, the firm employs over 80 skilled people at two high technology manufacturing facilities, which produce a globally recognised brand of products that are sold through 70 distributors in 26 countries.
Distributors:
To view, try out or purchase this shifter at a location closer to you please visit our authorised distributors below:
Australia:
Canada:
Worldwide:




{kind=link}